
10 Minuten
Forschende haben gezeigt, dass Schallwellen zur Koordination von Flotten winziger Roboter eingesetzt werden können, die sich wie lebende Kollektive verhalten: Sie bewegen sich synchron, passen ihre Form an enge Räume an und erholen sich sogar nach Beschädigungen. Die Entdeckung – geleitet von einem Team der Penn State und veröffentlicht in Physical Review X – eröffnet neue Wege für die Mikrorobotik in Medizin, Umweltreinigung und weiteren Bereichen.
Eine neue Studie unter Leitung von Forschenden der Penn State demonstriert erstmals, wie Schallwellen als Steuerungsmechanismus für mikro‑skalige Roboter fungieren könnten. Die Forschung verbindet Prinzipien der Schwarmrobotik, akustischer Signalverarbeitung und aktiven Materie und liefert detaillierte Simulationen, die praktische Umsetzungen inspirieren können.
Why acoustic signals matter for swarm robotics
Biologische Gruppen — von Fledermäusen, die Echoortung nutzen, bis zu Schwärmen von Insekten — verlassen sich häufig auf akustische Signale zur Navigation und Koordination. Inspiriert von diesen natürlichen Systemen modellierte das Forscherteam Mikroroboter, die akustische Signale aussenden und empfangen, um Zusammenhalt zu bewahren und kollektiv zu steuern. Akustische Kommunikation zeichnet sich dadurch aus, dass Schall sich im Vergleich zu chemischen Signalen schnell ausbreitet und relativ wenig gedämpft wird, was sie zu einem effizienten Kanal für die Koordination verteilter, einfacher Geräte macht.
In den Simulationen der Penn State verfügte jeder Agent über ein minimales Hardwareprofil: einen Antrieb zur Fortbewegung, ein winziges Mikrofon und einen Lautsprecher zum Austausch von Schallsignalen sowie einen Oszillator, der die Bewegung relativ zum akustischen Feld abstimmt. Trotz dieser Einfachheit ergab das Ensemble komplexe, emergente Verhaltensweisen — Formwechsel, Konvergenz zu starken Signalen und Wiederaufbau nach Störungen — Verhaltensweisen, die üblicherweise mit aufwändigen Kontrollsystemen verbunden sind. Diese Ergebnisse deuten darauf hin, dass die Kombination aus lokalem Feedback und physikalischer Signalübertragung kollektive Intelligenz ermöglicht, ohne dass jeder Knotenpunkt umfangreiche Rechenleistung besitzen muss.
How the simulation worked: a peek under the hood
Das Team verwendete ein agentenbasiertes Computer-Modell, um tausende kleine, selbstangetriebene Einheiten zu verfolgen. Jede simulierte Einheit emittierte ein periodisches akustisches Signal und erfasste das lokale akustische Feld, das von den Nachbarn erzeugt wurde. Durch Synchronisation seines internen Oszillators mit der dominanten lokalen Frequenz und durch Migration in Richtung der stärksten Schallquelle organisierte sich die Ansammlung sehr einfacher Einheiten selbst zu kohärenten Schwärmen.
Die Modellierung beruht auf allgemeinen physikalischen Prinzipien statt auf einer proprietären Software-Logik. Deshalb argumentieren die Forschenden, dass experimentelle Implementierungen mit ähnlichen akustischen und mechanischen Eigenschaften die Kernphänomene reproduzieren sollten. Kurz gesagt: Kollektive Intelligenz entstand aus bescheidenen Bausteinen — ohne zentralen Controller und ohne detaillierte Umgebungskarte, nur mit lokalem, schallbasiertem Feedback.
Die Simulationen lieferten zudem Einblicke in die Parameter, die für stabile Schwarmdynamiken entscheidend sind: Frequenzbandbreite der ausgegebenen Signale, Kopplungsstärke zwischen Schallfeld und Oszillator, Dämpfungsraten in der Umgebung sowie Bewegungseigenschaften wie Wendigkeit und Trägheit. Durch systematisches Variieren dieser Parameter konnten die Forschenden Phasenübergänge beobachten — etwa von ungeordneten Ansammlungen zu synchronisierten, kohärenten Strukturen. Solche Ergebnisse sind wertvoll für die Entwicklung robuster Prototypen in der Mikrorobotik, da sie konkrete Designregeln liefern, welche Hardware- und Softwareeigenschaften erwünscht sind.
Technisch gesehen kombinieren die Modelle Aspekte aus der nichtlinearen Dynamik (Phasensynchronisation), Wellenphysik (Interferenz und Superposition von Schallfeldern) und agentenbasiertem Verhalten (lokale Regeln, die zu globalen Mustern führen). Diese interdisziplinäre Herangehensweise macht die Arbeit relevant für Forschende in Robotik, Akustik, Physik der aktiven Materie und Biophysik, die nach skalierbaren Lösungen für kollektive Systeme suchen.
Potential missions: from inside the body to contaminated rivers
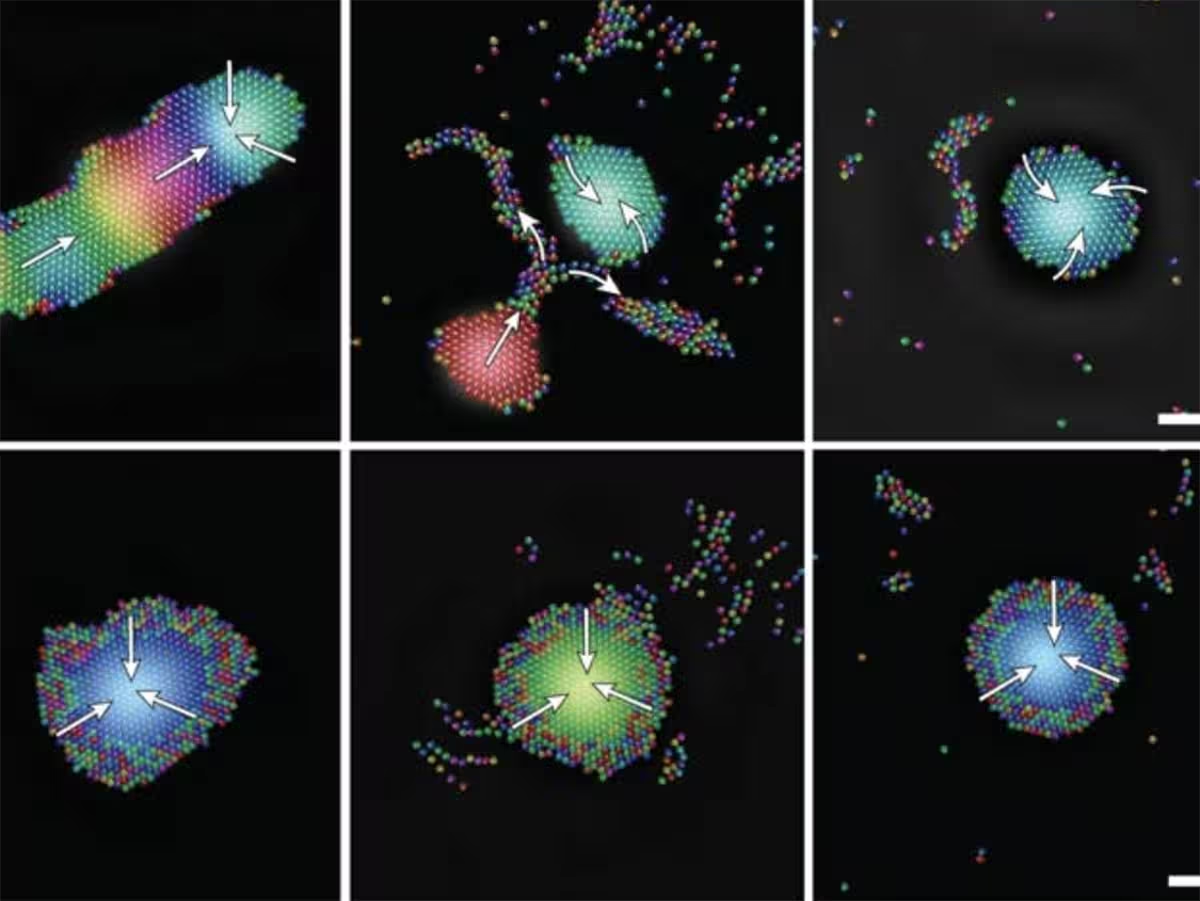
Was diese schallgesteuerten Mikroroboter besonders attraktiv macht, ist ihre Anpassungsfähigkeit. In den Simulationen schlängelten sich die Schwärme durch enge Korridore, setzten sich wieder zusammen, wenn sie getrennt wurden, und behielten ihre Funktionalität trotz teilweisem Ausfall einzelner Einheiten. Diese Form von Resilienz könnte für Anwendungen bahnbrechend sein, darunter:
- Gezielte Medikamentenabgabe: Flotten von Mikrorobotern könnten durch vaskuläre Kanäle navigieren, um Medikamente gezielt in betroffene Gewebe zu bringen und dabei gesunde Bereiche zu schonen. Die Nutzung akustischer Felder zur Navigation und Lokalisierung könnte eine Alternative zu chemischen oder bildgebenden Navigationsstrategien sein, insbesondere in schwierig zugänglichen Mikroumgebungen.
- Umweltreinigung: Verteilte Mikroroboter könnten Schadstoffe in komplexen Geländeformen aufspüren und neutralisieren, etwa in Sedimentschichten, verstopften Rohren oder Bereichen mit geringer Sicht. Akustische Schwärme könnten sich an Konzentrationsgradienten orientieren und koordinierte Reinigungsaktionen durchführen, ohne auf zentrale Steuerung angewiesen zu sein.
- Suche, Rettung und Inspektion: Kleine akustische Schwärme könnten eingestürzte Bauwerke oder enge industrielle Räume erforschen, in die Menschen und größere Roboter nicht vordringen können. Durch die Fähigkeit, Hindernisse kollektiv zu umgehen und sich neu zu formieren, bieten solche Systeme Vorteile für die Erkundung unsicherer Umgebungen.
Darüber hinaus sind Anwendungen in der Biomedizin denkbar, die über die reine Medikamentenabgabe hinausgehen: präzise Gewebeprobenahmen, lokale Diagnoseverfahren auf mikroskopischer Ebene oder die gezielte Modulation biologischer Mikro‑Ökosysteme. In Umwelttechnik und Infrastrukturüberwachung könnten schallbasierte Mikroschwärme für die Zustandsüberwachung von Rohrleitungen, Sedimenten und Grundwasserleitern eingesetzt werden, da sie sich an wechselnde Strömungsbedingungen anpassen können.
Wichtig ist, dass diese Einsatzzwecke eng mit Anforderungen an Sicherheit, Biokompatibilität und Umweltverträglichkeit verbunden sind. Bei medizinischen Anwendungen müssen akustische Pegel innerhalb sicherer Bereiche bleiben und Materialien biokompatibel sein. In Umgebungen mit lebenden Organismen gelten zusätzliche regulatorische und ethische Vorgaben, die bereits in frühen Prototypenphasen berücksichtigt werden sollten.
Scientific context: active matter and emergent intelligence
Die Ergebnisse speisen sich in ein wachsendes Forschungsfeld namens aktive Materie, das untersucht, wie viele selbstgetriebene Einheiten — seien es Zellen, Bakterien oder synthetische Partikel — großskalige Muster und Funktionen erzeugen. Historisch verließen sich Forschende häufig auf chemische Signale, um Wechselwirkungen in aktiver Materie zu programmieren. Die Demonstration akustischer Steuerung erweitert das Werkzeugset: Schall breitet sich weiter und schneller aus, und akustische Hardware kann auf kleinen Skalen extrem einfach und energieeffizient sein.
Laut dem Studienleiter Igor Aronson könnte dieser Ansatz Mikroroboter hervorbringen, die sowohl intelligenter als auch robuster sind, während sie zugleich minimale interne Komplexität beibehalten. Statt jede Einheit mit leistungsfähigen Prozessoren und einer Vielzahl von Sensoren auszustatten, könnten Designer die Physik ausnutzen — akustische Felder und Synchronisation — um koordinierte Verhaltensweisen in großem Maßstab zu erreichen. Dieser Paradigmenwechsel von reiner Rechenintelligenz hin zu physikgestützter Koordination ist vielversprechend für ressourcenbegrenzte, kleinmaßstäbliche Systeme.
Auf konzeptioneller Ebene ermöglicht die akustische Steuerung neue Arten von Emergenz: Phasenübergänge, skaleninvariante Musterbildung und robuste Anpassung an Störungen. Diese Mechanismen sind nicht nur für technische Anwendungen relevant, sondern liefern auch Einsichten in biologische Systeme, die sich ebenfalls zur akustischen Kommunikation bedienen. Die Forschung fördert somit ein besseres Verständnis von Grundprinzipien kollektiven Verhaltens, das sowohl die Robotik als auch die Biologie bereichert.
Challenges before real-world devices
Die Übertragung von Simulationen in Labor- und Feldgeräte erfordert die Lösung praktischer Probleme: Entwicklung von Sendern und Mikrofonen, die auf Mikroskalen zuverlässig funktionieren; Gewährleistung sicherer akustischer Pegel für biologische Gewebe; und Entwicklung von Materialien sowie Antriebsmethoden, die in Umgebungen mit chemischen Gradienten oder turbulenten Strömungen operieren können. Darüber hinaus müssen Forschende Fragen der Kontrolle in heterogenen Umgebungen adressieren und unbeabsichtigte Interferenzen zwischen mehreren gleichzeitig operierenden Schwärmen verhindern.
Technische Herausforderungen im Detail umfassen: Energiemanagement und Energiegewinnung auf kleiner Skala, Miniaturisierung robuster Aktoren, Rauschunterdrückung und Signalverarbeitung bei geringen Signalstärken sowie die Integration von Sensorik zur Erkennung physikalischer oder chemischer Parameter. Bei medizinischen Anwendungen kommen Anforderungen an Sterilisierbarkeit, Biokompatibilität und regulatorische Zulassungsverfahren hinzu. Bei Umweltanwendungen sind Haltbarkeit in aggressiven Medien und Rückholbarkeit bzw. Abbaubarkeit mögliche Restriktionen.
Ein weiterer komplexer Aspekt ist die Mehrschichtsteuerung: Wie lassen sich lokale Regeln, die auf akustischem Feedback basieren, mit höheren Steuerungsebenen kombinieren, die strategische Ziele und Missionsplanung übernehmen? Die Kombination aus dezentraler akustischer Kopplung und gelegentlicher globaler Instruktion (z. B. durch externe Schallquellen oder akustische Modulationsmuster) könnte ein praktikabler Ansatz sein, um Flexibilität und Kontrolle zu balancieren.
Expert Insight
Dr. Maya Patel, eine Robotikingenieurin mit Schwerpunkt Schwarmsysteme, bemerkt: 'Die eigentliche Eleganz akustischer Koordination liegt in der Einfachheit. Man braucht keine umfangreiche Berechnung auf jedem Knoten — nur die richtige Kopplung zwischen Aussendung, Detektion und Bewegung. Allerdings ist die Herstellung winziger Wandler, die langlebig und energieeffizient sind, die nächste große Herausforderung. Wenn wir das lösen, wird das Anwendungsspektrum — von gezielten Therapien bis zu Umweltsensorik — enorm wachsen.'
Fachleute betonen außerdem die Bedeutung interdisziplinärer Zusammenarbeit: Physiker, Maschinenbauer, Elektrotechniker, Materialwissenschaftler und Biologen müssen zusammenarbeiten, um funktionale Prototypen zu bauen. Laborversuche mit gut kontrollierten akustischen Eigenschaften sind ein notwendiger Zwischenschritt, um Modellannahmen zu verifizieren, bevor teurere in vivo- oder Feldtests durchgeführt werden.
Zusätzlich sollte die Forschung Standards und Benchmarks für akustische Schwärme entwickeln, vergleichbar mit den Benchmarks in der Drohnen‑ oder Multi‑Agentenforschung. Solche Referenztests würden die Vergleichbarkeit von Ergebnissen zwischen Laboren verbessern und die Entwicklung gemeinsamer Designprinzipien beschleunigen.
What comes next
Zukünftige Arbeiten werden wahrscheinlich Experimente mit zunehmend kleineren akustischen Komponenten und realistischeren Umweltmodellen kombinieren. Cross‑disziplinäre Teams, die Physiker, Ingenieure, Biologen und Materialwissenschaftler verbinden, sind nötig, um Prototypen zu bauen und deren Leistung in relevanten Einsatzszenarien zu testen. Wenn akustische Schwärme physisch so realisiert werden können, wie sie in den Simulationen erscheinen, könnten sie eine praktikable, gering‑komplexe Route zu intelligenten Mikrorobotern darstellen, die kollektiv Aufgaben lösen, die einzelnen Geräten außerhalb ihrer Reichweite liegen.
Kurzfristig sind praktische Demonstratoren in kontrollierten Laborumgebungen zu erwarten: etwa Mikroroboterschwärme in Flüssigkeitsbehältern, die akustisch synchron agieren, oder kleine robotische Kolonien, die in mikrofluidischen Kanälen navigieren. Mittelfristig könnten erste Anwendungen in nicht‑klinischen Bereichen wie Umweltmonitoring oder industrieller Rohrinspektion auftreten. Langfristig besteht das Potenzial für medizinische Anwendungen, vorausgesetzt, technische, regulatorische und ethische Hürden werden adressiert.
Insgesamt zeigt die Studie, wie physikbasierte Steuerungsprinzipien — hier die Nutzung von Schallwellen — die Entwicklung skalierbarer, resilienter und energieeffizienter Mikroroboter vorantreiben können. Solche Systeme kombinieren einfache Hardware mit komplexem kollektivem Verhalten und eröffnen damit neue Wege in Forschung und Praxis der Schwarmrobotik, der aktiven Materie und der anwendungsorientierten Mikrorobotik.
Quelle: scitechdaily
Kommentar hinterlassen