4 Minuten
Das Wettrennen um verkörperte Intelligenz
Verkörperte Intelligenz — Roboter, die physisches Handeln mit fortgeschrittener Wahrnehmung, Schlussfolgerung und Entscheidungsfindung verbinden — bewegt sich von Laborvorführungen hin zu einem umkämpften kommerziellen Feld. Während Unternehmen wie Tesla, Boston Dynamics und NVIDIA proprietäre Wege verfolgen, treibt ein neuer chinesischer Herausforderer, X Square Robot, ein Open-Source-Foundation-Model namens Wall-OSS voran, das Roboter in unvorhersehbaren realen Umgebungen zuverlässig anpassungsfähig machen soll.
Stand der Branche
Der humanoide Optimus von Tesla verspricht Großserienfertigung und Verbraucheranwendungen, und Elon Musk hat ehrgeizige Produktionsziele gesetzt. Boston Dynamics' Atlas zeigt dynamische Fortbewegung und Manipulation in inszenierten Szenarien. NVIDIA nähert sich der Robotik softwareorientiert mit Isaac und GR00T und bietet Simulationen und Foundation-Modelle, die als „Gehirn“ für Roboterplattformen fungieren. Dennoch bleibt eine Lücke zwischen beeindruckenden Demos und verlässlicher Alltagsleistung.
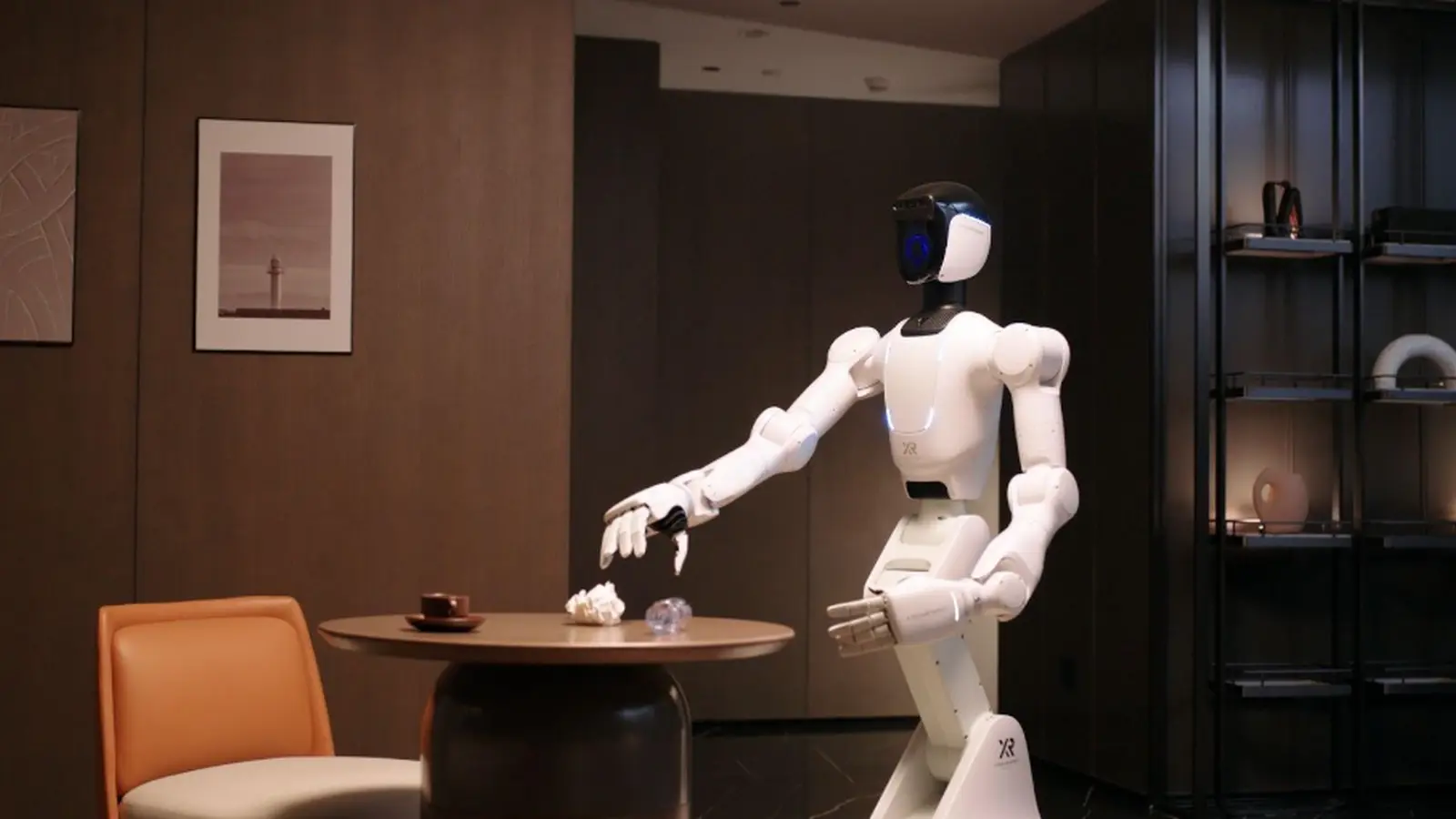
Vorstellung von Wall-OSS und dem Quanta X2
Wall-OSS von X Square Robot wird als Chinas erstes offen veröffentlichtes Foundation-Modell für verkörperte Intelligenz beschrieben, erhältlich auf GitHub und Hugging Face. Um das Modell in Aktion zu demonstrieren, stellte das Unternehmen den Quanta X2 vor: einen rollenden Serviceroboter mit einem 7-Freiheitsgrad-Arm, einer geschickten Hand, die lebensechte Gesten ausführen kann, bis zu 62 Freiheitsgraden für natürliche Bewegungen und rotierenden Klemmen, die für 360°-Reinigung ausgelegt sind. Gemeinsam zeigen sie einen Open-Source-Softwarestack gepaart mit praxisorientierter Hardware.
Wesentliche Produktmerkmale
- Gemeinsamer Aufmerksamkeitsmechanismus: konzentriert sich selektiv auf relevante sensorische Hinweise, um Entscheidungsfindung zu beschleunigen und Fehler zu reduzieren.
- Task-Routed Feed-Forward Networks (FFN): separate Verarbeitungspfade für Vision, Sprache und Bewegung, um die Engpässe einstromiger Architekturen zu vermeiden.
- Chain-of-Thought (CoT)-Reasoning: interne mehrstufige Planung vor der Ausführung, die reaktive Fehler bei komplexen Aufgaben verringert.
- Großangelegtes multimodales Training: Milliarden von Vision-Sprache-Aktion-Beispielen aus Roboter-Logs, generativen Videos und synthetischen Umgebungen.

Wie sich Wall-OSS technisch unterscheidet
Anders als ältere Systeme, die alle Eingaben durch eine einzige Schicht leiten, lenkt Wall-OSS multimodale Daten in spezialisierte Pfade. Visuelle Eingaben nutzen optimierte Kanäle für Objekterkennung und räumliche Kartierung; sprachliche Befehle werden separat geparst; Bewegungsplanung berücksichtigt physikalische Einschränkungen und Echtzeit-Feedback. In Kombination mit CoT-Reasoning ermöglicht dies kontextgerechtes Handeln – etwa die Ausführung einer mehrstufigen „Tisch reinigen“-Routine statt der isolierten Behandlung einzelner Unteraufgaben.
Vergleich und Vorteile
Im Vergleich zu Tesla Optimus und Boston Dynamics Atlas priorisiert Wall-OSS Anpassungsfähigkeit über spektakuläre Vorführungen. NVIDIAs Isaac und GR00T liefern leistungsstarke Entwicklerwerkzeuge und Simulationsökosysteme, doch positioniert sich Wall-OSS als offenes, sofort einsetzbares Foundation-Modell, das Hardwarehersteller und Startups unmittelbar integrieren können. Zu den Vorteilen gehören schnellere Reaktionszeiten, weniger falsch priorisierte Befehle, verbesserte Leistung in unübersichtlichen oder neuen Umgebungen und die kollaborativen Vorteile der Open-Source-Entwicklung.
Praktische Anwendungsfälle
- Service und Gastgewerbe: Tischabräumen, Lieferungen, automatisierte Reinigung.
- Lagerhaltung und Logistik: dynamisches Stapeln, Paketbearbeitung, Routenanpassung.
- Unterstützung im Gesundheitswesen: Instrumentenvorbereitung, nicht-kritische Pflegeaufgaben, sterile Handhabungsprozesse.
- Verbraucher- und Heimrobotik: anpassungsfähige Haushaltsassistenten, die verschiedene Raumkonfigurationen und Objekte tolerieren.
Marktrelevanz und Ausblick
Mit rund 100 Millionen US-Dollar an Finanzierung setzt X Square Robot darauf, dass ein Open-Source-Foundation-Modell die Lücke zwischen choreografierten Demos und verlässlicher, praktischer Robotik schließen kann. Wenn Wall-OSS auf GitHub und Hugging Face breite Akzeptanz findet, könnte es die Wettbewerbslandschaft verändern, indem es eine generalisierbare Intelligenzschicht für diverse Hardwareplattformen liefert und die Produktentwicklung für Startups und etablierte Hersteller beschleunigt.
Risiken und nächste Schritte
Die Open-Source-Veröffentlichung ermöglicht schnelle Iteration, bringt aber auch Herausforderungen in Bezug auf Sicherheit, Qualitätssicherung und Standards mit sich. Die reale Nutzung erfordert rigorose Validierung, regulatorische Abstimmung und kontinuierliche Fortschritte in verkörperter Intelligenz, multimodalem Reasoning und robuster Wahrnehmung. Dennoch markieren Wall-OSS und der Quanta X2 eine bemerkenswerte Verschiebung: Das Rennen dreht sich zunehmend um praktische Zuverlässigkeit, skalierbare Foundation-Modelle und kollaborative Innovation in der Robotik.
Quelle: gizmochina
Kommentar hinterlassen