
9 Minuten
Buick Electra L7 siegt in unabhängigen China-AD-Test — Tesla bleibt zurück
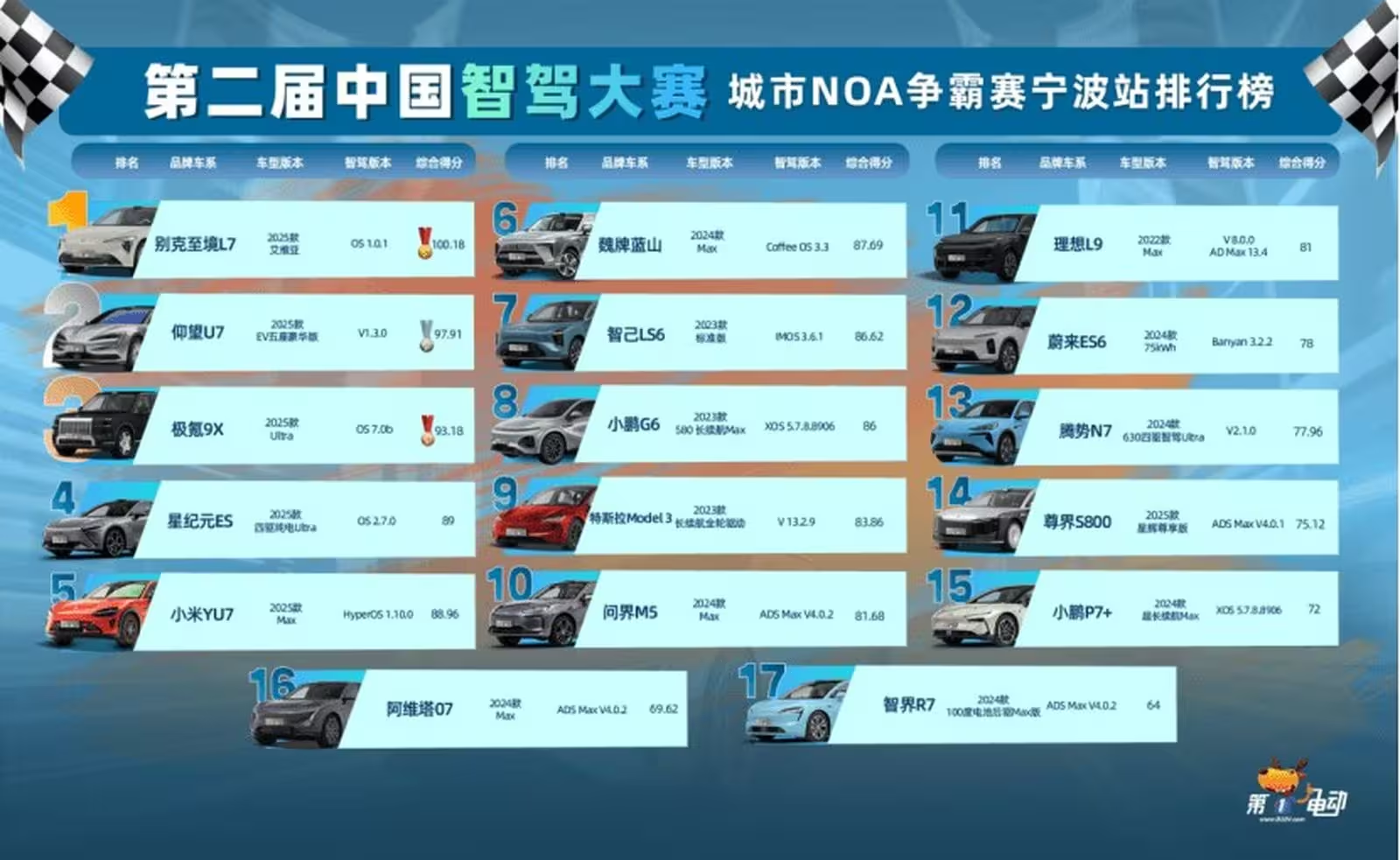
Nur wenige Tage nachdem Tesla Investoren mitgeteilt hatte, die vollständige Autonomie sei in Reichweite, lieferte ein unabhängiger Wettbewerb für autonomes Fahren in China eine ganz andere Einschätzung. Organisiert von D1EV in Ningbo, Zhejiang, setzte sich beim Second China Intelligent Assisted Driving Competition der SAIC-GM Buick Electra L7 an die Spitze eines Feldes von 17 Fahrzeugen, während der Tesla Model 3 enttäuschend Neunter wurde. Dieser Wettbewerb ist ein aufschlussreicher Praxistest für autonome Fahrsysteme (ADAS) und liefert wichtige Erkenntnisse für Hersteller, Zulieferer, Flottenbetreiber und Regulierungsbehörden.
Der 29 Kilometer lange Kurs, der städtische und ländliche Abschnitte kombinierte und 28 Ampeln, fünf Wegpunkte sowie acht anspruchsvolle Teststrecken enthielt, wurde geheim gehalten, um gezielte Anpassungen der Systeme an bekannte Szenarien zu verhindern. Genau diese Geheimhaltung offenbarte jedoch die realen Stärken und Schwächen einer breiten Palette fortschrittlicher Fahrerassistenzsysteme (ADAS) und autonomer Software-Stacks. Solche unabhängigen Tests liefern oft belastbarere Aussagen zur Systemreife als Laborprüfstände oder herstellergeführte Demos.
Wichtigste Ergebnisse
- 1. Platz: Buick Electra L7 (SAIC-GM) — 100,18 Punkte
- 2. Platz: BYD YangWang U7 — 97,91 Punkte
- 3. Platz: Geely Zeekr 9X — 93,18 Punkte
- 5. Platz: Xiaomi YU7 — 88,96 Punkte
- 9. Platz: Tesla Model 3 — 83,86 Punkte

Diese Ergebnisse unterstreichen einen größeren Trend: In China haben zahlreiche Autohersteller und Technologieunternehmen ihre ADAS- und autonomen Funktionen schnell weiterentwickelt, oft durch den Einsatz von LiDAR-Sensorik und Multi-Sensor-Fusion in Kombination mit hochpräzisen Karten und KI-Modellen. Die Kombination aus Hardware (Sensoren) und Software (Perception-, Planning- und Control-Modelle) bestimmt zunehmend, welche Systeme in komplexen urbanen und ländlichen Umgebungen zuverlässig funktionieren.
Warum der Electra L7 gewann
Der Electra L7 ist ein Extended-Range-Elektrofahrzeug (EREV) von SAIC-GM, das einen effizienten Antriebsstrang mit einem robusten autonomen Software-Stack kombiniert. Ausschlaggebend war, dass es das erste Fahrzeug im Wettbewerb war, das mit Momentas R6 Flywheel Big Model AD-Plattform für sein Navigate on Autopilot (NOA)-System ausgestattet ist. Momenta setzt auf großskalige Wahrnehmungs- und Planungsmodelle, die Multi-Sensor-Fusion — insbesondere LiDAR — betonen. Diese Architektur scheint auf dem Kurs den Unterschied gemacht zu haben.

Mehrere Testsegmente hoben diesen Vorteil hervor. Ein künstlich angebrachter, transparenter Kunststoffschirm, der niedrige Sichtbarkeit simulieren sollte, wurde nur von sechs Fahrzeugen erkannt: Li Auto L9, YangWang U7, Nio ES6, Buick Electra L7, Zeekr 9X und Xiaomi YU7 — alle mit LiDAR ausgestattet. Sichtbasierte Systeme allein, darunter Teslas FSD/Intelligent Assisted Driving, übersahen dieses Hindernis vollständig. Das zeigt, dass die Kombination aus LiDAR-Daten und KI-gestützter Fusion die Wahrnehmung bei schwierigen visuellen Bedingungen merklich verbessert.
Technisch gesehen profitierte der Electra L7 von mehreren Faktoren: präzise Punktwolken aus LiDAR für eine zuverlässigere Objekterkennung, robuste Sensor-Fusion-Algorithmen, die Radardaten und Kamerabilder integrieren, sowie leistungsfähige Karten- und Planungsschichten, die in Echtzeit Trajektorien berechnen. Zudem trug die Systemintegration zwischen Fahrzeugsteuerung und NOA-Software zu stabileren, vorhersehbaren Manövern bei — ein wichtiger Aspekt für Punkte in solchen Wettbewerben.
Streckenanforderungen und Systemverhalten
Der Parcours mischte enge Wohnstraßen, Kreisverkehre, U‑Turn-Manöver mit eingeschränkter Sicht, ländliche Wege und künstliche Hindernisse, um Navigation, Spurauswahl, Hinderniserkennung und Entscheidungsfindung zu prüfen. Zu den auffälligsten Punkten gehörten:
- Enge Straßen: Diese Abschnitte waren so konzipiert, dass präzise Lenk- und Ausweichmanöver gefordert waren; drei Fahrzeuge forderten eine Fahrerübernahme an (Wey 07, Xiaomi YU7, Xpeng G6), was auf Grenzen bei Kollisionsvermeidung und Pfadberechnung hinweist.
- Kreisverkehre: Alle Teilnehmer bewältigten die Kreisverkehre, was auf eine allgemein verbesserte Logik zur Spurwahl und situativen Anpassung hinweist.
- U‑Turn mit toter Sicht: Mehrere Fahrzeuge hatten Probleme; Nio ES6 und Xpeng G6 verlangten Fahrerübernahmen, während Denza N7 von der vorgegebenen Route abwich.
- Künstliches, transparentes Hindernis: Nur LiDAR‑ausgestattete Fahrzeuge erkannten dieses zuverlässig, was die Bedeutung von aktiver Distanzmessung gegenüber reiner Kamerawahrnehmung betont.
- Verwirrende U‑Turn-Route: Einige Modelle fuhren falsche Abzweigungen oder benötigten Eingriffe, was Schwächen in der Routenlogik und im Umgang mit mehrdeutiger Beschilderung offenbart.

Zwei zusätzliche Szenarien — eine Rechtsabbiegesituation mit anschließender Wendung und eine gering befahrene Landstraße — trennten die Wettbewerber weiter. Der Tesla Model 3 bestand zwar erfolgreich die Rechtsabbiegetestsequenz, zeigte jedoch inkonsistente Performance über die gesamte Strecke hinweg, was zu seiner Platzierung im Mittelfeld beitrug. In der Praxis ist Konsistenz oft wichtiger als punktuelle Erfolge: Flottenbetreiber und Kunden benötigen reproduzierbare Ergebnisse in einer Vielzahl von Szenarien.
Darüber hinaus demonstrierte der Test, wie wichtig saubere Fail‑safe-Strategien und Mensch‑Maschine‑Schnittstellen sind. Systeme, die zu häufig eine Fahrerübernahme verlangen, vermindern den praktischen Nutzen teilautonomer Funktionen; solche, die zu selten eingreifen, riskieren Sicherheit. Ein ausgewogenes Verhalten mit transparentem Status-Feedback an den Fahrer ist ein Schlüsselfaktor für die Akzeptanz.
Was das für Tesla und den breiteren AD‑Markt bedeutet
Tesla hat öffentlich den Vorstoß in Richtung Künstliche Intelligenz, Robotaxis und vollständige Autonomie betont, wobei Elon Musk die Aussicht auf unbeaufsichtigtes Fahren bis Ende 2025 in Aussicht gestellt hat. In Nordamerika konzentriert sich die Debatte häufig auf Tesla versus Waymo, wobei Letztere in begrenzten Gebieten fahrerlose Dienste betreiben. Der chinesische Markt zeigt jedoch ein anderes Bild: Ein dichtes, schnelllebiges Ökosystem aus lokalen Herstellern und Tech‑Firmen integriert LiDAR, hochpräzise Kartierung und großskalige KI‑Modelle, um AD‑Funktionen in komplexen urbanen und ländlichen Mischumgebungen robuster zu machen.
Aus dem Wettbewerb lassen sich zwei zentrale Schlussfolgerungen ableiten:
- Die Wahl der Sensorik ist entscheidend. LiDAR‑gestützte Systeme zeigten klare Vorteile bei der Hinderniserkennung und Szenarienwahrnehmung, insbesondere bei transparenten oder kontrastarmen Gefahren.
- End‑to‑End‑Versprechen ersetzen nicht die solide, szenariobasierte Praxiserprobung. Eine einzelne erfolgreiche Demo oder eine optimistische Ankündigung für Investoren wiegt weniger als wiederholte, vielfältige Feldtests auf öffentlichen Straßen und in Wettbewerbssituationen.
Markt- und Produktkontext
Der Sieg des Electra L7 stärkt SAIC‑GMs Reputation in einem Markt, in dem Verbraucher und Regulierungsbehörden zunehmend Wert auf ADAS‑Sicherheit und Validierung unter realen Bedingungen legen. Für Tesla ist das Ergebnis eine Mahnung, dass vision‑basierte Ansätze in bestimmten Anwendungsfällen noch Beschränkungen aufweisen — vor allem dann, wenn großskalige Wahrnehmungsmodelle und LiDAR‑unterstützte Fusion ins Spiel kommen. Es ist wichtig zu betonen, dass weder LiDAR noch Vision per se die alleinige Lösung sind; erfolgreich sind integrierte Systeme, die Sensordiversität und robuste KI‑Modelle kombinieren.
Ein Wettbewerbsbeobachter fasste die Situation treffend zusammen: „Der Electra L7 zeigte konsistente Entscheidungsfindung über vielfältige Szenarien hinweg. Genau das wird für Kunden und Flottenbetreiber bei der Auswahl AD‑fähiger Fahrzeuge entscheidend sein.“ Solche Aussagen betonen den Wert von Vorhersehbarkeit, Wiederholbarkeit und einer klaren Sicherheitsstrategie.
Blick nach vorn
Es ist zu erwarten, dass weitere Testläufe und öffentliche Demonstrationen folgen, während Hersteller ihre NOA‑ und ADAS‑Funktionen verfeinern. Die Dynamik in China dürfte neue Partnerschaften zwischen OEMs und KI‑Unternehmen (wie Momenta) fördern und die LiDAR‑Adoption in Mittel‑ und Oberklassefahrzeugen weiter beschleunigen. Gleichzeitig werden Standards für Kartenaktualisierung, Datensouveränität und Validierungsprozesse an Bedeutung gewinnen, da Regulatoren eine nachvollziehbare Sicherheitsdokumentation fordern.
Für Fahrer und Flottenkäufer lautet die einfache Lektion: Fokus auf validierte Systemleistung unter realen Bedingungen, statt auf bloße Versprechen. Wettbewerbe wie das D1EV‑Event sind deshalb wertvoll, weil sie Systeme versteckten, abwechslungsreichen Szenarien aussetzen — ein härterer, aussagekräftigerer Maßstab für Einsatzbereitschaft als geskriptete Demonstrationen.
Aus technischer Perspektive dürfte die Kombination aus hochauflösenden, kurzreichweitigen LiDAR‑Sensoren, redundanten Radarsystemen, kamerabasierten Erkennungsmodulen und großmodelligen KI‑Architekturen (für Wahrnehmung und Planung) zum bevorzugten Ansatz werden. Ergänzend gewinnen kontinuierliche Kartenaktualisierung (HD‑Mapping), Vehicle‑to‑X‑Kommunikation und On‑device‑Inference für Modelle an Bedeutung, um Latenz zu minimieren und Datenschutz zu wahren.
Auf regulatorischer Ebene könnte das Ergebnis den Druck erhöhen, standardisierte Prüfverfahren und Zertifizierungen für teilautonome Systeme zu entwickeln. Vergleichbare, transparente Benchmarking‑Protokolle würden Herstellern ermöglichen, konkrete Sicherheitsmetriken zu liefern, die von Verbrauchern und Regulierungsbehörden leicht verstanden werden können.
Highlights
- Event: Second China Intelligent Assisted Driving Competition, Ningbo
- Strecke: 29 km, 28 Ampeln, 5 Wegpunkte, 8 Testbereiche
- Siegertechnik: Momenta R6 Flywheel Big Model AD auf dem Buick Electra L7
- Implikation: LiDAR + großmodellige KI‑Fusion übertrifft derzeit vision‑only Lösungen in komplexen Szenarien
Während das Rennen um autonomes Fahren an Intensität zunimmt, werden jene Teams die Nase vorn haben, die sichere, reproduzierbare Leistung auf unvorhersehbaren, realen Straßen nachweisen können. Dieser Test zeigt, dass Tesla in China noch Hausaufgaben hat, während etablierte und lokale Akteure ihren Vorsprung mit neuen Sensor‑Stacks und KI‑Partnerschaften ausbauen. Langfristig wird nicht allein die Frage entscheiden, wer die fortschrittlichste KI entwickelt, sondern welches System in der Praxis zuverlässig, sicher und wirtschaftlich einsetzbar ist.
Abschließend bleibt festzuhalten: Innovationen im Bereich autonomes Fahren schreiten rasant voran, doch die Validierung in der realen Welt — unter variierenden Wetterbedingungen, Lichtverhältnissen und unvorhersehbaren Hindernissen — bleibt der ultimative Prüfstand. Wettbewerbe wie dieser sind deshalb unverzichtbar, um Fortschritt messbar und vergleichbar zu machen.
Quelle: autoevolution
Kommentar hinterlassen